はじめに
自動車のナビゲーションや無人搬送、ドローン配送など、移動体が目的地まで安全かつ効率的に到達するためには、走行ルートを適切に設計・制御する技術が欠かせません。近年は電動化や自動運転の進展により、単なる経路探索にとどまらず、エネルギー管理や通信連携、周辺環境との協調まで含めた高度な走行計画技術へと発展しています。
本技術レポートでは、日本の特許公報6,960件(2005〜2025年、日本公開特許公報)を対象としたRadar Tech Intelligenceの解析結果にもとづき、モビリティ分野における走行ルートに関する技術の全体像を俯瞰します。
全体俯瞰
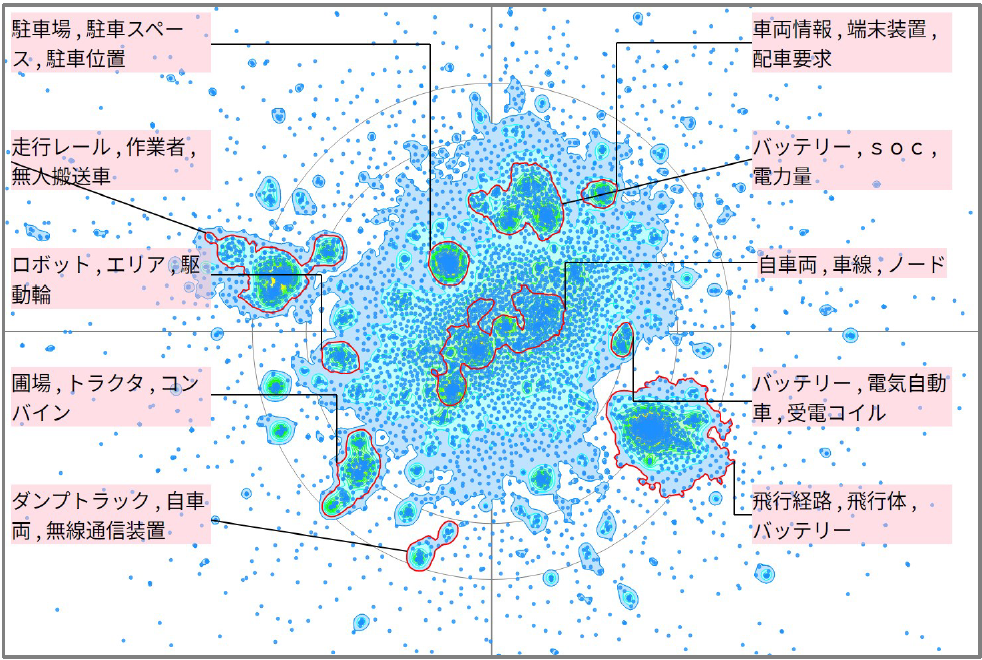
図1:モビリティ分野における走行ルート関連技術の全体俯瞰
図1はモビリティ分野における走行ルート関連技術の全体像を表した俯瞰図です。この俯瞰図では、特許の内容が近いもの同士をマップ上で近くに配置し、特許が密集している箇所を主要な技術領域として示しています。
特徴語の上位には、「道路」「地図」「ユーザー」「検出」「ナビゲーション」「送信」「通信」「現在位置」「地点」「エリア」「探索」「予測」「計画」「しきい値」「車線」「操舵」「交差点」などが挙げられます。これらは、走行環境の把握や自己位置推定、最適経路生成、安全判定および車両制御といった、走行ルート技術の中核要素を構成する概念であり、センシング・地図処理・通信連携・自律制御が一体となって進化していることを示しています。
俯瞰図上では、【飛行経路,飛行体,バッテリー】領域において無人機の航路計画とエネルギー最適化、【自車両,車線,ノード】領域では車線単位の経路生成や局所経路平滑化、【走行レール,作業者,無人搬送車】領域では工場内搬送の安全制御、【バッテリー,SOC,電力量】領域では航続管理や充放電戦略、【駐車場,駐車スペース,駐車位置】領域では自動駐車支援、【圃場,トラクタ,コンバイン】領域では農業機械の高精度経路追従など、多様なモビリティ用途に対応した技術群が確認されます。
主要プレイヤー
特許出願の観点では、自動車メーカーおよび車載部品メーカーが中心的な役割を担っています。トヨタ自動車やデンソー、日産自動車などは長期にわたり継続的な出願を行い、走行ルート技術の基盤形成を主導してきました。
一方で、物流・産業分野に目を向けると、無人搬送車やロボット駆動系の量産化進展を背景に、マテリアルハンドリング機器を展開するダイフクや、交通・制御システムを手掛ける日立製作所など、産業・インフラ系企業の存在感も高まっています。
時系列トレンドとキーワード
時系列の解析からは、走行ルート技術が従来の地図ベース経路探索中心の段階から、センサー情報や通信情報を統合したリアルタイム制御へと移行してきたことが確認されます。
近年では、電動車両の電池残量を考慮した経路最適化、複数車両の協調走行、無人航空機の飛行経路制御、農業機械の自律走行など、エネルギー・通信・自律制御を統合した技術領域が拡大しています。
まとめ
モビリティ分野における走行ルート関連技術は、電動化と自動運転の進展を軸として、ナビゲーション中心の従来技術から、エネルギー管理や協調制御を含む高度モビリティ基盤へと進化しています。
特に、物流搬送や農業機械、無人航空機など多様な分野で実用化が進み、一部領域では商品化や量産化が現実的な段階に到達しています。今後は、都市交通や社会インフラとの連携を通じて、より効率的で持続可能な移動体験を実現する中核技術として位置付けられていくことが期待されます。